5-感知机

5 感知机
5.1 感知机模型
感知机(perceptron)是一种用于二分类的线性分类模型:输入为实例的特征向量,输出为实例的类别,取+1和-1二值。
感知机是19571年提出的,比较早的一个模型,但是它算是SVM和神经网络模型的基础。如果之前已经了解过逻辑回归(logistic regression),其实就比较容易理解感知机了,硬要说的话,逻辑回归其实是从感知机发展而来的。
感知机模型可以用下面的公式来表示:
其中,$w \cdot x + b$ 是线性方程,$w$是权值(weight),$b$是偏置(bias),$sign$是符号函数。
符号函数的定义如下:
其图像示例为: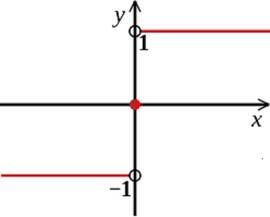
即,符号函数对大于等于0的值,映射为1;对小于等于0的值,映射为-1。
对于线性部分 $w \cdot x + b$ 的结果施加的函数,可以称为激活函数(activation function)。所以,当激活函数为 $sign$ 函数时,模型就是感知机;激活函数为 $sigmoid$ 函数时,模型就成了逻辑回归。二者的图像画在一起如下:
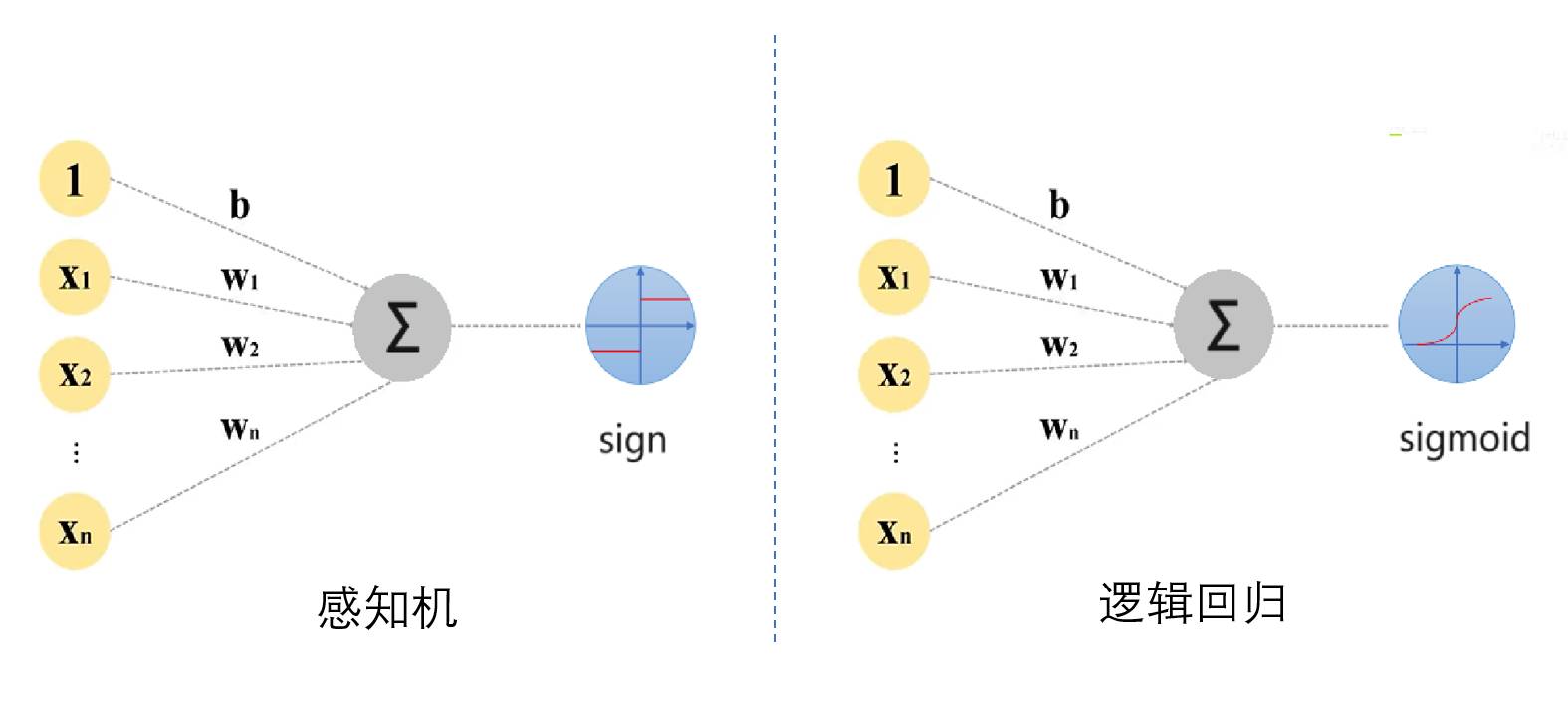
可知,感知机的结果就是1或者-1,而逻辑回归的结果是0到1之间的连续值,所以逻辑回归依然用的是“回归”名字,只不过可以通过取阈值 threshold 来做进一步的二分类。
在深度学习领域,还有更多的激活函数,比如 ReLU、Leaky ReLU、ELU 等,这里不做赘述。
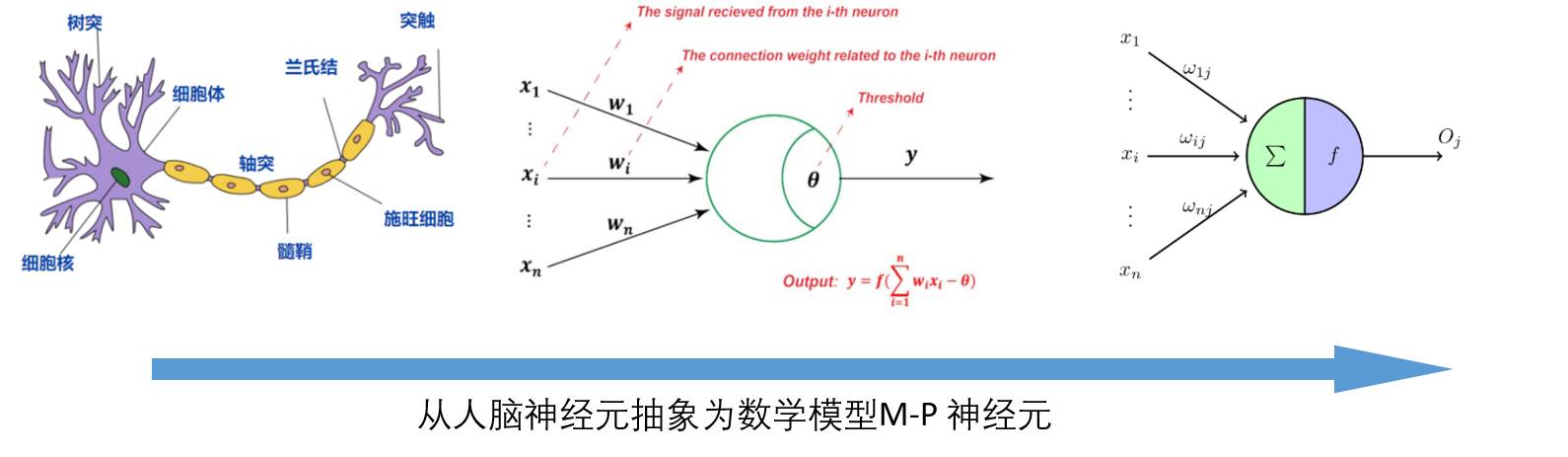
一个线性加权和经过激活函数,这样的结构被称为 M-P 神经元,它是 1943 年Minsky 和 Papert2 模拟神经元的工作原理而提出的。
5.1.1 感知机的目的
感知机模型的目的,就是找到一个最优的分类边界,使得分类结果尽可能的好。也就是说,最终目标就是使得 $w \cdot x + b=0$ 形成的线性超平面(二维的情况就是一根线,三维的情况就是一个面,多维的情况就是超平面),能够将样本分割为正、负两部分,如下图所示。
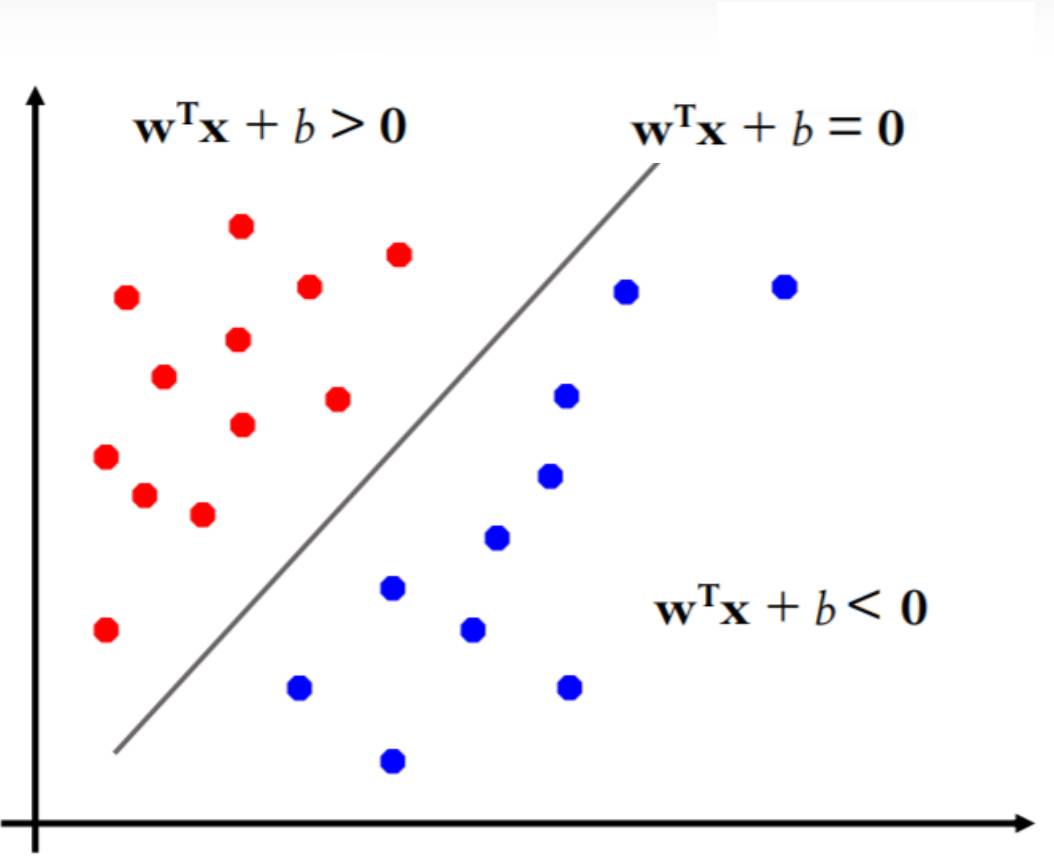
如果一个数据集能够找到至少一个超平面将样本点正确地分割开,就称该数据集为线性可分的。如果一个数据集无法找到一个超平面将其分割开,就称该数据集为线性不可分的。
5.1.2 感知机的学习策略
上面提到,感知机就是期望找到一个线性超平面将数据集分为两部分,所以要确定超平面 $w \cdot x + b=0$ 就是要确定其法向量 $w$ 和截距 $b$ 这两个参数,所以就需要确定一个损失函数,并将损失函数极小化来获取对 $w$ 和 $b$ 的估计。
损失函数的一种想法是,统计误分类点的个数,然后用误分类点的个数来作为损失函数。但是,这样的损失函数不是参数 $w$ 和 $b$ 的连续可导函数,所以无法使用梯度下降法来求解。
另一种想法是,统计误分类点到超平面的距离,来作为损失函数。这样,损失函数就是参数 $w$ 和 $b$ 的连续可导函数,就可以使用梯度下降法来求解。
点 $x_0$ 到平面的距离公式为:
其中,$||w||$ 表示法向量 $w$ 的模,也就是 L2 范数。
对于误分类点 $(x_i, y_i)$ ,有两种情况:
- 点 $x_i$ 在超平面的左侧,即 $w \cdot x_0 + b < 0$ ,分类结果为-1,但标签却为 $y_i=1$ ,那么点 $x_i$ 到超平面的距离为:
- 点 $x_i$ 在超平面的右侧,即 $w \cdot x_0 + b > 0$ ,分类结果为 1,但标签却为 $y_i=-1$ ,那么点 $x_i$ 到超平面的距离为:
所以会发现,误分类点到超平面的距离,去掉绝对值符号后都可以统一写为:
则假设误分类点的集合为 M,则损失函数为:
对于感知机来说,损失函数可以不考虑 $||w||$ 部分,直接将损失函数写为:
思考的角度不是说直接去掉 $||w||$ 部分,而是假设 $||w||$ = 1。 因为任何一个 超平面都可以将其改写为 $||w||$ = 1 的形式,即对每个系数都除以 $||w||$ 即可,同时超平面本身不会变化。比如对于一个超平面:
将其改写为:
其实超平面还是原来那个超平面,但是改写后的 $||w||$ = 1 。
5.1.3 参数优化算法方法
采用随机梯度下降(SGD)的方法,对损失函数求梯度:
则更新公式为:
其中 $\eta$ 为学习率。每一次选取一个误分类点即可。这样通过不断迭代就能使得损失函数 $L(w, b)$ 不断减小,直到为0,就说明没有误分类点了。
5.1.4 算法收敛性
根据 Novikoff定律,当训练集数据线性可分时,感知机算法是收敛的。如果训练集数据线性不可分,则感知机算法不收敛,迭代结果发生震荡。
需要注意的是,感知机学习算法对训练数据集的元素顺序敏感,即误分类点选取的顺序不同,可能导致学习结果的不同。同时,感知机算法对于参数初始值也比较敏感,如果初始值设置不当,可能会导致学习失败。
5.2 多层感知机
5.2.1 感知机的局限性
感知机的局限性:感知机不能解决异或问题。
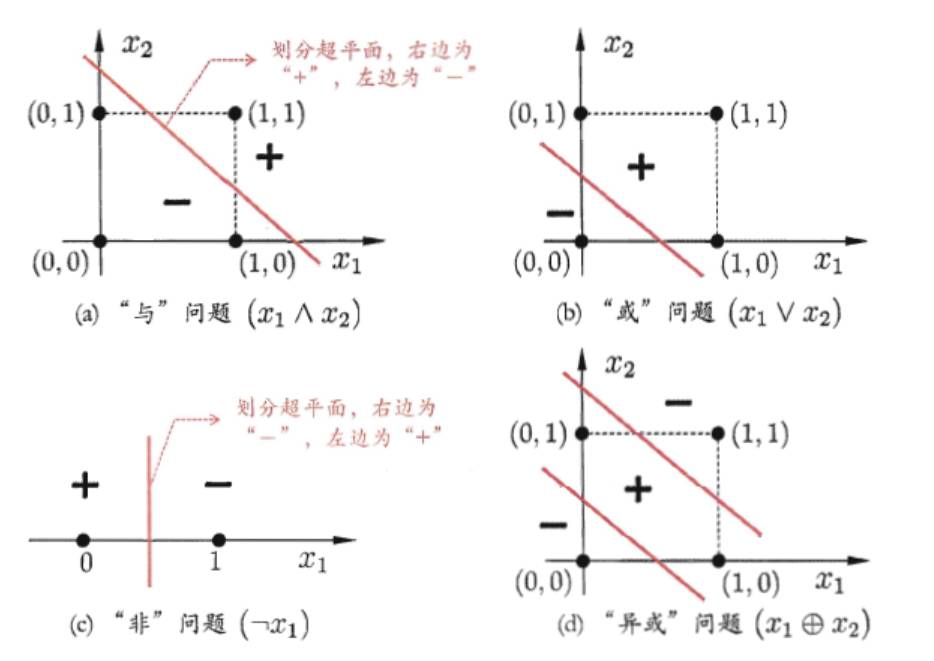
如果所示,用一个超平面是无法将异或问题划分的,它是属于线性不可分问题,一般有两个思路:
对输入数据做处理,看看能否将输入数据映射到高维度空间中,在高维空间或许能找到一个线性超平面,将其分开。这其实就是 SVM 算法中的核方法。
用多个感知机,每个感知机负责将一部分数据分开,最后将分开的数据合并起来。这其实就是多层感知机。
多层感知机能解决异或问题:
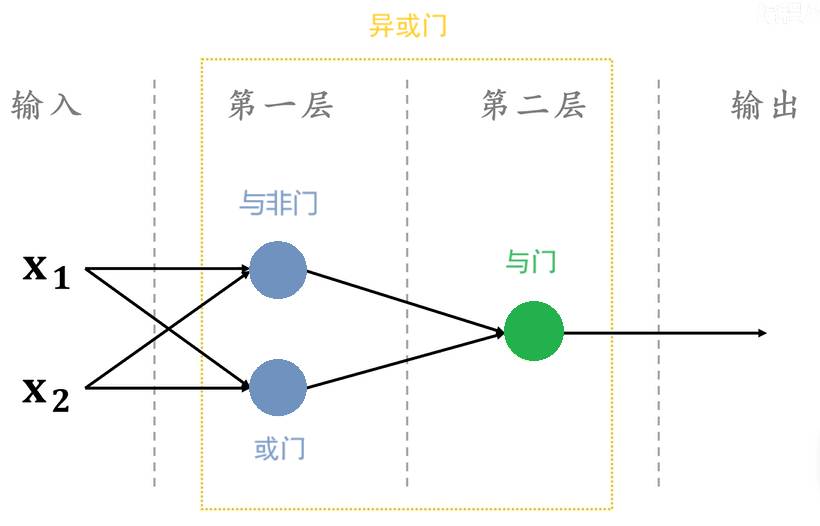
如果所示的多层神经网络,第一层用了两个神经元,一个神经元用来实现与非门,一个神经元用来实现或门;第二层用了一个神经元,用来实现与门。最终整个多层感知机,实现了异或门的功能。
5.2.2 多层感知机的发展
由于多层感知机可以解决异或问题的启发,可以想到,如果增加神经元的层数,是可以解决更复杂的问题的。
如图所示:
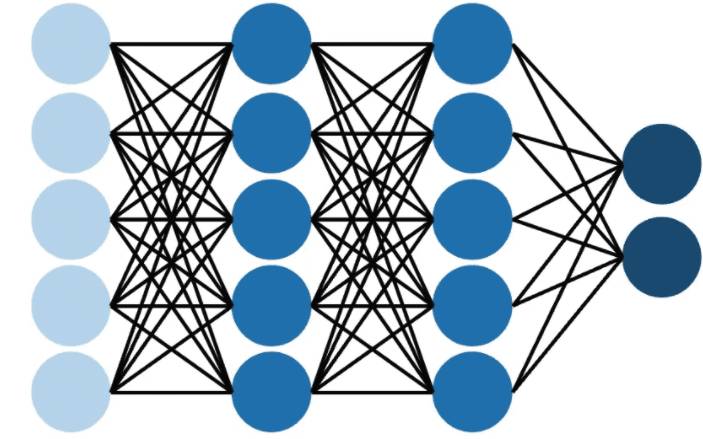
多层感知机中,每一个神经元的输出,都输入到下一层所有的神经元中;除第一层外,每个神经元的输入都是上一层所有神经元的输出,按照现在深度学习的叫法,这种连接方式称之为“全连接(Fully-Connected)”, 从数学角度看就是在做矩阵乘法。
Hornik 等人在19893年证明,只要多层感知机中的神经元个数和层数足够多,那么多层感知机就能以任意精度逼近任何连续函数,足见其强大的表示能力。同时,BP(反向传播)算法的提出,使得多层感知机能够以较简单的方式训练。到现在,得益于计算力和数据的飞速爆炸,脱胎于多层感知机的深度学习,已经成了人工智能领域的主流技术。
目前神经网络和深度学习已然成为了一门单独的学科,但是它的发展历程和理论基础,都和多层感知机有着千丝万缕的关系。所以深度学习其实可以被看作是多层感知机的一个延伸和扩展,是机器学习算法的一个分支。
1:Frank Rosenblatt. (1957). The perceptron: A perceiving and recognizing automaton. Report 85-460-1. Cornell Aeronautical Laboratory.
2:McCulloch, W. S., & Pitts, W. (1943). A logical calculus of the ideas immanent in nervous activity. The bulletin of mathematical biophysics, 5, 115-133.
3:Hornik, K., Stinchcombe, M., & White, H. (1989). Multilayer feedforward networks are universal approximators. Neural networks, 2(5), 359-366.